Experimentos
Experimentos
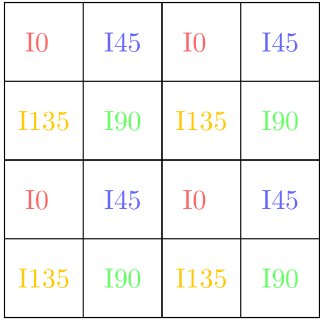
Para generar las imágenes de entrada para el algoritmo principal, se submuestra las imágenes del dataset con el fin de disminuir su resolución a la cuarta parte de la original. Una vez submuestreadas, los píxeles de las mismas se utilizan para formar una nueva imagen del estilo obtenido por una cámara DoFP. Esto se logra ubicando los píxeles de las imágenes en el lugar correspondiente al ángulo de polarización de la imágen sin submuestrear, como se ve en la Figura 1
Las imágenes originales del dataset, sin submuestrear, consituyen el Ground Truth del proyecto contra el cual comparar los resultados del algoritmo.
Sobre las imágenes de tipo DoFP construidas se aplica el algoritmo principal de interpolación. Para cada una se calculan como métricas el error cuadrático medio (MSE), la Structural Similarity Index Measure (SSIM) y la Peak Signal-to-Noise Ratio (PSNR) así como un mapa de error para medir la diferencia entre la salida del algortimo implementado y la imagen original del dataset. Estos resultados son comparados, además, con los obtenidos mediante un esquema de interpolación más "tradicionale", como lo es la interpolación bilineal.
Dos de las medidas mencionadas (MSE y PSNR) se calculan a partir de la diferencia entre la imagen correspondiente al Ground Truth y la salida del algoritmo, es decir, solamente toman a las dos imagenes como matrices de números, sin tener en cuenta como son percibidas por el ojo humano. SSIM, por otro lado, utiliza medidas de contraste, luminancia y estructura para intentar obtener un valor que mejor represente qué tan bien veríamos la imagen. Los mapas de error se obtienen a partir del valor absoluto de la diferencia entre las imágenes, proporcionando una forma más visual de medir el rendimiento del algoritmo.